
Detachable robotic hand can crawl and grasp objects on both sides
On Tuesday in the journal Nature Communications, Aude Billard of the Swiss Federal Institute of Technology and colleagues presented a design for a hand-like robot that can detach from its arm, crawl to pick up several objects and then reattach, the team said.
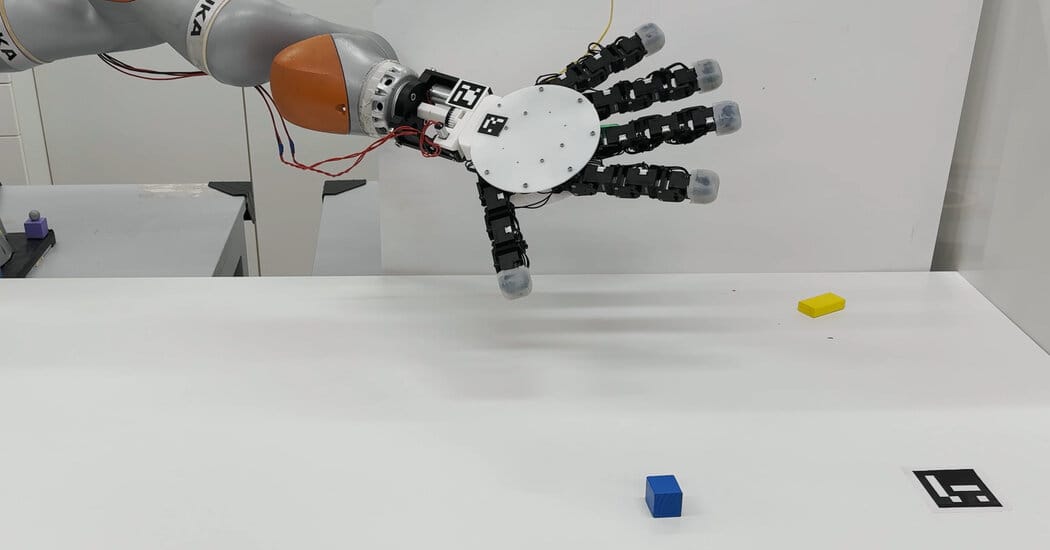
The researchers built the device from silicone, motors and 3-D-printed parts and fitted a disc-shaped palm to which multiple identical fingers can attach. Its software learns grasps in simulation and the resulting instructions are loaded onto the real robot. Unlike typical robotic hands, each pair of digits can clasp an item, fingers can wrap singly or together or pin objects to the palm, and different combinations can grip both sides of the palm simultaneously.
When released the hand acts like a mechanical spider, using its digits to scuttle along a surface with fingers deployed as graspers or legs or occasionally knuckling along, Dr. Gao said; he suggested detachability could let the device inspect tight spaces such as inside a water pipe or a submarine engine room. Outside commentators noted limits: Nancy Pollard said a digit that flexes in opposing directions may not apply the same pressure as a more rigid finger and she saw little evidence of manipulation once objects were held, while Perla Maiolino called the approach innovative and said it “increases the taxonomy of grasping.” Dr. Billard said she hopes the work will spur further innovation.
Key Topics
Science, Robotic Hand, Aude Billard, Xiao Gao, Wuhan University, Robotic Grasping