
Perseverance AI-planned 807-foot drive visualized with Caspian tool
NASA and JPL released an animation made with the Caspian visualization tool using data from an 807-foot (246-meter) drive by the Perseverance rover on the rim of Jezero Crater on Dec. 10, 2025 (sol 1,709). The mission’s “drivers,” or rover planners, use the visualization to understand Perseverance’s autonomous decision-making by showing why it chose one specific path over other options.
This was one of two drives in which generative artificial intelligence provided the route planning, the first occurring on Dec. 8. The AI analyzed high-resolution orbital imagery from the HiRISE camera aboard NASA’s Mars Reconnaissance Orbiter and terrain-slope data from digital elevation models to identify critical terrain features such as bedrock, outcrops, hazardous boulder fields, sand ripples, and the like.
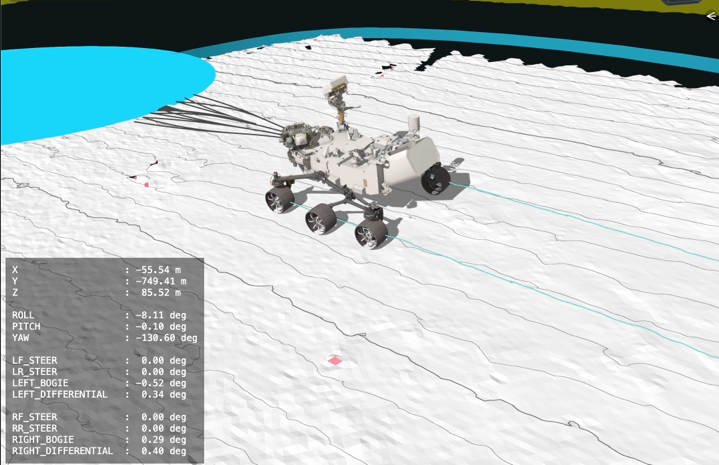
From that analysis it generated a continuous path complete with waypoints, fixed locations where the rover takes up a new set of instructions. In the animation, pale blue lines depict the rover’s wheel track and black lines snaking out in front of the rover show different path options the rover considers moment to moment.
The white terrain Perseverance drives onto is a height map generated using data the rover collected during the drive, and a pale blue circle that appears near the end marks a waypoint. The image credit is NASA/JPL‑Caltech and the photojournal entry is dated 01/30/2026.
perseverance rover, caspian visualization tool, 807-foot drive, jezero crater rim, sol 1,709, generative ai route planning, hirise camera, mars reconnaissance orbiter, digital elevation models, terrain-slope data, rover waypoints, autonomous decision-making